トニック・ファンクション:ロルフィング・ストラクチュラル&ムーブメント・インテグレーションにおける重力応答モデル Kevin Frank
ケビン・フランク ---
要旨
著者は、フランス人ロルファーであるユベール・ゴダール(Hubert Godard)によって提示されたトニック・ファンクション(トーヌス機能)理論の基礎的な原理を要約する。トニック・ファンクションのモデルは、これまでイントリンジック・ムーブメント(内在的な動き)と呼ばれてきたものの統合的な原理として、人間の身体における重力応答(gravity response)に焦点を当てる。この原理は、ロルフィング・ストラクチュラル&ムーブメント・インテグレーション(RSI / RMI)特有の差異の大部分を明確にするための一つの方法である。重力応答に影響を与える諸因子を特定することは、ロルファーがどのように働いてイントリンジック・ムーブメントを喚起するのかを明確にする目的に役立つ。さらに、このモデルはRSIおよびRMIの教育方法を組織化するのにも活用できる。
ロルファーは、身体とその場(フィールド)を、地球とその重力場(グラビティ・フィールド)へと関係づけることを生涯の研究としており、重力場が身体のエネルギー場を強化できるように身体を組織化する。これが私たちの主要なコンセプトである。
— アイダ・P・ロルフ博士(Dr. Ida P. Rolf)
重力をめぐる問題のスペクトラム
ストラクチュラル・インテグレーションの創始者であるアイダ・ロルフ(Ida Rolf)は、人間の可能性の進化を考察する上での重力の重要性を強調した。彼女は、重力を理解することの重要性がオステオパシーのアプローチにおいて欠落していることを示唆していた。²
そのそれぞれの歴史を通じて、武道、太極拳、ヨガ、ダンス理論、およびその他の身体運動の諸流派は、身体と重力との関係性を最適化することについて語ってきた。ロルフィング・ストラクチュラル・インテグレーションにおける重力の関連性は、アライメント(重力への経済的な適応をもたらすもの)として、あるいは、より統合された構造に対して重力が作用することによってもたらされるさらなる構造的変化という観点から表現されることが多い。ロルフィング・ムーブメント・インテグレーションは歴史的に、重力に「仕事をさせる」、重力によって筋膜ネット(fascial net)を伸長させる、「上がるために下りる(letting down to go up)」といった、重力に関連する戦略を強調してきた。最後にあげたものは、説明はされていないものの効果的なアイデアであり、運動の専門家の間で広く共有されている。これらの重要なアイデアは、実際のところ、重力の重要性を完全に表しているだろうか。私はそうは思わない。ロルフ博士がそれを指摘した唯一の人物というわけではないが、重力の重要性に関するロルフ研究所の見解は、身体教育や身体療法の分野において未だ特異なものである。
ロルフ博士の正確なビジョンがどのようなものであったかは分からないが、それはしばしば、重力場との人間的関係性という言葉で表現されていた。彼女がこの根本的な点を主張したことの筋道を立てようと試みる中で、私たちはそれを物理学、あるいは形而上学を通して検証することができる。また、重力場に生きる生物の生理学に影響を与える根本的な因子として重力を検証することにより、生物学的な視点から見ることもできる。ロルフィングの基礎となるモデルを提案しようとする諸試みのうち、重力生物学的なアプローチは、ロルファーが有能であるために習得する、一見ばらばらなアイデアやテクニックの間に一貫性を見出すことに適している。
なぜモデルが必要なのか?
ここに提示されるアイデアは、その大部分がユベール・ゴダール(Hubert Godard)の仕事に由来している。多くのロルファーは、すでに彼の概念や観察のいくつかに気づいている。本論文は、この素材がなぜ重要であるように思われるのかの概略を述べるものである。それは、クライアントにおける機能の見方や変化の引き出し方を学ぶための規律としてだけでなく、より重要には、ロルフィングを定義することの難しさを照らし出す理論として重要なのである。ロルフィングは複雑な領域であり、それを世界に向けて表現するという私たちの使命は単純ではない。私たちの学生はロルフィングの効果を経験しているため、それを信念として受け入れている。しかし彼らは、実践者としてそれを世界に表現するという挑戦に直面する。私たちはどのようにすれば、ロルフィングを学生に最もよく教え、そして世界に向けて表現することができるだろうか。
私たちの何人かにとって、ゴダールのモデルは、ロルフィングの核心的なイデオロギーである「重力」と「レシピの論理的原理」に対して忠実であり続けながら、その複雑さに明快さをもたらしてくれた。本論文はこの重力の問題を扱う。
ユベール・ゴダールの最初の学位は化学である。彼はダンサーとなり、最終的にはダンスの教師、そしてダンス教師を育てる教師となった。教師を教えるという責任は、特定の教授技術がなぜ効果的なのかを極めて明確に分節化することを含む挑戦である。この背景こそが、ゴダールの仕事が有用である理由の一部だと私は考えている。さらに、彼の仕事はダンスパフォーマンスの競争の激しい世界や、イタリアの病院におけるリハビリテーションの現場でテストされてきた。運動理論の生理学的基盤を求めようとするゴダールの意欲は、その一部を神秘性から解放することを可能にしている。(運動の神経制御について私たちが未だ知らないことが多く存在するため、その多くは神秘的なままである。)
クライアントとワークをする際、生理学や物理学に根ざした運動理論は必要ではない。クライアントは理論がなくても私たちのワークを評価してくれる。しかしながら、学生や教師を教えることになる人々のためのカリキュラムを設計する場合、つまり理論的討論を伴うタスクにおいては、ワークが科学に何らかの基礎を置いているとき、より合理的かつ効果的になる。もし指導が単なるテクニックの教授以上のものになることを望むなら、そして学生が状況が生じるにつれて新しいテクニックを創造できるようになることを望むなら、指導は常にテクニックではなく原理を強調しなければならない。ロルフ研究所のファカルティメンバーはこの必要性を認識し、この方向へのステップを踏み出してきた。
最適な機能
重力を考察する前に、ストラクチュラル&ムーブメント・インテグレーションのゴールが何であるかを問うことが重要である。私たちの方法とモデルは、私たちのゴールとビジョンを反映しているべきである。ゴールの議論は、最適な機能の記述へとつながるはずだ。ダンサー、アスリート、または俳優の視点から見ると、最適な機能には、運動変化のニーズへの素早い適応能力が含まれる。それには、明らかな労力なしにジャンプできることが含まれるかもしれない。パフォーマンスにおいて、私たちはパフォーマーが正確に、有能に、そして美学的に動きを遂行する能力を評価する。日常生活においては、ゴールはもっと単純かもしれない。痛みがなく、心地よく、歪みなく動き、疲労から素早く回復することである。これらのどの例においても、私たちはソマティックな療法家として、機能の向上が重要であり可能であると主張している。私たちは、この機能の向上を、明示的には合意されていないものの、一般的には次のような内容を含む特定の原理に基づかせている。身体の最小限の硬直性、運動の有効性と適切な強さ、移動(ロコモーション)の微細さ(すなわち、どの筋肉が運動を行っているのかを知覚することが困難な種類の運動)、歩行における対側性の脊椎機能、自由で十分な呼吸、などである。
誰もが最適な機能を記述するためのお気に入りの方法を持っている。それ自体として正しい運動というものは存在しないが、それぞれの状況において、各身体が反応し適応しなければならない課題が存在する。広く自由に適応する能力は、成功した運動のための一般的な基準を構成する。この能力は、それぞれの具体的な運動状況において、より正確に定義することができる。しかしながら、本記事の決定的な焦点は、適応能力と成功した運動の根底にあるものにある。
重力
一般的に、不成功な運動は、身体の重力制御システムを利用する能力がほとんど、あるいはまったく存在しない状態で起こる。運動制御システムが重力、あるいは重力を模倣する状況に自動的に応答するとき、それは制御が純粋に随意的(自主的)であるときよりも、はるかに経済的に、効果的に、そして心地よく行われる。確かに、人々がこの自動的な応答を見出すのを手助けすることは、単純な問題ではない。通常、私たちはストラクチュラル・アナリシス(構造分析)、構造的な軟部組織マニピュレーション、視覚化、ブレスワーク(呼吸法)、運動実践、言語的交渉、ラポール(信頼関係)などの組み合わせを用いることによって、機能における小さな変化を得ることに成功する。これらの多種多様な介入を、重力制御システムに影響を与えるという視点から見るとき、なぜそれらが効果的なツールであるのかについて、より大きな明快さを得ることができる。
重力に関する議論への入り口は、人間が重力に敏感な生物として進化したことを認識することである。出生時、私たちは流体の環境を離れ、地球の重力場を基準として上向きおよび下向きの方向性(オリエンテーション)を持つ環境へと入る。私たちはこの新しい世界を交渉する準備ができている。なぜなら、私たちは重力に反応し、方向づけをし、動き、ポスチャーを仮定することを可能にする複雑な制御システムを内部に携えているからである。重力との直接的な関係性は、母親との関係性と同時に交渉されなければならない。結果として、重力応答は必然的に母親との関係性と結びつき、双方は重なり合って層をなす。ボニー・ベインブリッジ・コーエン(Bonnie Bainbridge Cohen)が簡潔に指摘しているように、「神経は生存への重要性の順に髄鞘化(マイエリン化)する。すべての脳神経の中で、最初に髄鞘化し始める一対は...前庭神経である。前庭神経が最初に髄鞘化し始めるということは、それらが生存のための最初の不可欠な機能を果たすことを示している。それは、頭部への触覚、味覚、嗅覚、聴覚、および視覚を登録する必要性に先んじている。」⁴ 私たちが栄養のために方向づけをする前に、まず重力場における運動のために方向づけをしなければならない。
すべての運動と方向づけの基礎は、私たちがそれについて考えているかどうかにかかわらず、私たちを直立に保つことに捧げられている脳と神経システムの部分によって制御されている。重力応答は感覚発達において第一のものであり、それは私たちが何をするにしても、常に目に見えない形で存在している。例えば、立っているときに、目の前に腕を上げるように言われた場合、最初に収縮する筋肉は何だろうか。腕の運動を制御する筋肉が最初に収縮するのではなく、むしろ、腕を伸ばすことから生じる変化した重心のバランスをとる必要性を予測(アンティシペーション)する、足首と脚の筋肉なのである。(このエクササイズは、重力応答に関連する運動が、私たちが動く前に設定されており、直接的な随意的制御によって変更できないことを証明している。知覚(パーセプション)、感情、あるいは状況の意味を変更することによってのみ、重力応答の設定を変更することができる。私たちは、最適な運動のモデルを模倣することによって、最適な方法で動くことを学ぶことはできない。正しい運動の形態は、各個人の構築(コンストラクト)と、その人が自分自身の身体や周囲の空間をどのように感じるか、そしてその人がその状況をどのように分類するかに依存している。⁵
私たちがロルフィング・ストラクチュラル&ムーブメント・インテグレーションの実践者として求めているすべての応答は、重力応答に結びついている。重力と最適な機能との結びつきは、ジェフリー・メイトランド(Jeffrey Maitland)によるパリントノス(palintonos)概念の見事な使用において示唆されている。それは、地球と空、そして2つの方向における長さやスパン(張り)の感覚であり、この極性によってエネルギーを与えられたイベントとしての身体である。しかし、私たちはどのようにしてパリントニックなラインを生理学/キネシオロジーに基礎づけるのだろうか。パリントニックな構図に対するより決定的な応答のいくつかは、より高い具体性への求めであり、共通の科学的言語との結びつきであると私は信じている。
関連する生理学
重力応答は人間の身体においてどのように作動し、ストラクチュラル・インテグレーションおよびムーブメント・インテグレーションの多くの側面は重力応答とどのように関連しているのだろうか。私たちが最初に理解する必要がある概念の一つは、伸張反射(stretch reflex)である。私たちを直立に保つ筋肉のトーヌス(tonus)は、高次脳の制御なしに維持される。伸張受容器は、繊維の伸長変化を感知することによってトーヌスをモニターする。伸張受容器には多くの異なる種類が存在する。キース・バゼル(Keith Buzzell)は、その記事「体性入力の潜在的な破壊的影響(The Potential Disruptive Influence of Somatic Input)」の中で、筋肉がどれだけ、またどれほど速く引き伸ばされるかだけでなく、どのような加速度で引き伸ばされるかに関する情報の連続体を脊髄に提供する、幅広い伸張受容器の配列について記述している。⁷ (重力システムと脳機能とを結びつける側面に焦点を当てるため、ゴルジ腱器官は意図的にこの議論から除外されている。)このフィードバックシステムは、私たちの意識的な気づきなしに筋肉のトーヌスを調整することができる。
運動の予測(アンティシペーション)は、すでに一つの運動である。運動の予測は、脳の他の部分からの入力に応じて小脳によって整理されるタスクである。その後、それはフィードバック受容器を通じて筋肉内で制御およびモニターされる。上記の例において、腕を動かす意図はヒラメ筋に緊張を伝える。この例をさらに拡張すると、そのヒラメ筋の緊張は身体全体とその運動の質にどのように影響を与えるだろうか。
筋肉の中で、伸張受容器(筋紡錘)の数が比較的多いものは、機能においてトニック(持続性・緊張性)である。トニックな筋肉は、フェージック(運動性)な筋肉よりも効率的に酸素を燃焼させることができるため、ゆっくりと着実に長期間働くことが可能である。さらに、それらはフェージックな筋肉に対する制御機能を持っている。それらはフェージックな筋肉の働きを調整する。ヒラメ筋は前脛骨筋に対して調節機能を果たし、ハムストリングスは大腿四頭筋に対して調節機能を果たす。トニックな筋肉が調節を行うのは、それらが筋紡錘をより密に備えているからである。結果として、それらはそれ自体およびその拮抗筋における微細なレベルの収縮を分化させることができる。フェージックな拮抗筋における収縮は、トニックな作動筋において非常に正確な反応を引き起こす。重力応答制御システムが運動を組織化するとき、トニックな筋肉が持つより多くの紡錘数は、制御情報を受け取るためのより優れた備えとなる。
また、トニックな筋肉は、延髄や網様体(reticular formation)における電荷のレベルに影響を与えることによって、多かれ少なかれ、身体全体の伸張反射の興奮閾値に影響を与える容量を持っている。⁹ もし伸張反射の興奮閾値が低い(つまり、延髄と網様体に高い電荷があることを意味する)場合、一般的に言って、身体は硬くなる。もし閾値が高い場合、身体はより柔らかくなる。フィードバックループは両方向に働き、ポジティブになる可能性を秘めている。網様体と延髄の高い電荷は伸張反射をより敏感にし、それが今度はさらなる刺激となってより高い電荷を引き起こす。低い電荷は伸張反射を鈍感にし、さらなる伸長を引き出すことによって電荷を下げ続けることができる。「減少した反射応答」、「増加した反射応答」、「より柔らかい」、「より硬い」は、本質的に良い状態や悪い状態の記述ではない。むしろ、それらは変化する状況に素早く適応する身体の能力の記述である。これらの適応が経済的であるとき、インテグレーション(統合)がその結果となる。必要な応答を動員する能力を獲得することが私たちのゴールである。
例えば、非常に硬いハムストリングスを持つクライアントに脊椎を伸長させるようコーチングすることにより、伸ばした脚を顔の近くまで持ってくることができる。(このハムストリングス伸長のエクササイズは、この点を説明するためにゴダールによって使用される印象的なデモンストレーションである。)この例では、脊椎のトニックな筋肉が解放(リリース)され、一般化された伸張反射の感受性の低下が生じている。結果として、ハムストリングスははるかに低い抵抗で伸長することが可能になる。(網様体は、実際のところ、紡錘体が密集した脊椎の筋肉からのメッセージや、感覚的なキューや方向の感覚を身体の一般的なトーヌスを落ち着かせるためのシグナルとして解釈する皮質および辺縁系からのメッセージによって影響を受けている。)一つのトニックな筋肉群が解放されると、他の筋肉もより容易に解放されることが可能になる。逆に、健康な被験者で膝蓋腱反射をテストする際、両手を等尺性(アイソメトリック)収縮で押し合わせると、反射はより速く、より強くなるはずである。硬く保持されたトニックな筋肉は、他の筋肉におけるより強く速い収縮を促進することができる。記述された両方のケースにおいて、キネシオロジー的な制御の階層性が暗示されている。また、どちらのケースにおいても、その状況が、行動の必要性や休息の必要性を感知するよう高次脳機能にシグナルを送ることによって網様体に影響を与えている。脊椎を伸長させることについては、後に詳しく述べる。
重力応答を利用する第二の方法が存在する。筋肉を神経支配できる運動ニューロンには、アルファ運動ニューロンとガンマ運動ニューロンの2つのカテゴリーがある。アルファニューロンは2つの方法で制御される。直接的な随意的制御によるものと、ガンマ運動ニューロンを介した間接的な制御、すなわちガンマ・ループ(gamma loop)として知られるものである。最終的には、アルファニューロンが仕事を行う——この点を明確にしておくことが重要である。しかしながら、皮質による直接的な随意的制御は、筋肉のフィードバックポイントにおける紡錘体のガンマ刺激を通じた間接的な制御とは大きく異なる。(ゴダールは、運動の神経支配のために雇用されるのは全アルファニューロンの極めて小さな割合であると指摘している。膨大な数のアルファニューロンが、知覚を解釈し処理することに関与している。知覚の役割に関するこの観察は、私たちが運動をどのように教えるかにおいて重要である。アルファシステムを最適に利用するために、私たちはクライアントに対し、主にアルファ運動応答を引き起こす形態を模倣させるのではなく、感覚に気づくこと、あるいは方向を感じるように導く。)¹⁰
運動のガンマ・ループ始動は、身体の空間的方向づけ(空間へのオリエンテーション)への応答の結果として、運動が小脳および延髄において構想され実行されるときに起こる。¹¹ ガンマ運動ニューロンは、紡錘体が錘内繊維の伸長から経験するであろうものと同じ伸張受容器メカニズムを達成するためにそれを行うが、それは紡錘体の収縮を神経学的に刺激することによって直接的に行われる。ガンマ運動ニューロンが発火すると、紡錘体が収縮し、それによって周囲の環状らせん終末(annulospiral ending)が引き伸ばされ、筋肉が伸長されていなくても反射が誘発される。(環状らせん終末は、筋肉とその隣接する紡錘体が引き伸ばされる通常の伸張反射において引き伸ばされる。)このように、直立を維持することや静止トーンを維持することが問題となっていない状況、および筋肉が引き伸ばされていない状況においても、筋肉フィードバックシステムの重力応答を動員することができる。
直接的な制御の状況(アルファのみ)においては、労力の経験があり、ある時点で疲労が生じる。間接的なループ(ガンマ)においては、私たちが直立を保つためのヒラメ筋の収縮を感じないのと同様に、労力や疲労の経験がほとんどない。最終的にはヒラメ筋も疲労するが、私たちはそれをそれほど感じない。さらに、ガンマ・ループによる筋肉の神経支配は、拮抗筋の活動をより効果的に不活性化する。つまり、意図された行動に抵抗する筋肉は、ガンマシステムが関与しているときに静められる。あるいは、その逆を述べると、大脳皮質が動きを制御するとき、しばしば不必要な拮抗筋の応答が存在する。したがって、より多くの労力が使用され、それは意図された行動に対して逆効果となる。
よく知られた例は、「曲がらない(アンベンダブル)」腕である。被験者は腕をまっすぐ前に突き出し、手をテスターの肩に置く。彼女はテスターが下向きの力を加える際、腕を曲げられないようにと言われる。腕は曲がることに抵抗できない。被験者がテスターの背後の壁に向かって届く(リーチする)ように言われると、腕はより強くなり、曲がることに容易に抵抗できる。ゴダールは筋電図(EMG)を用いて、被験者が腕をまっすぐに保つために労力を使っている最初のケースにおいて、上腕二頭筋(この例における拮抗筋)が関与して活動しており、同様に(作動筋である)上腕三頭筋も活動していることを示した。その行動は、拮抗筋によって意図せずサボタージュ(妨害)されているのである。後者のケースにおいては、リーチの衝動が拮抗筋を引き起こさず、結果としてより大きな有効性をもたらした。
ガンマ運動システムは、このより効率的な筋肉の使用の原因として想定されている。ガンマ・ループが活性化されるのは、皮質がそのタスクを空間的方向づけを行う脳の部分へと委ね、それが今度はアルファ運動システムを活性化するためにガンマ・ループを雇用するからである。ロルフ博士は、彼女が(理想的には)...「屈筋が屈曲するとき、伸筋は伸展する」¹³ という声明を出した際、この現象に言及していた。私たちはこの状態を、相反神経支配(reciprocal innervation)のより純粋な機能として記述することができるだろう。相反神経支配は、私たちが自らの随意的であり、したがって分化の度合いが低いアルファの指令によってそれをサボタージュしないときにうまく機能する。
要約すると、運動のために重力応答システムを利用することは、より効果的で、労力が少なく、拮抗筋の逆効果な収縮を最小限に抑える可能性が高く、より微細な制御を可能にする運動へとつながる。ストラクチュラル&ムーブメント・インテグレーションの運動のキュー(合図)は、これらの質を喚起するように設計されている。明らかに、これらの原理はすでに私たちのテクニックの多くに暗黙のうちに含まれている。
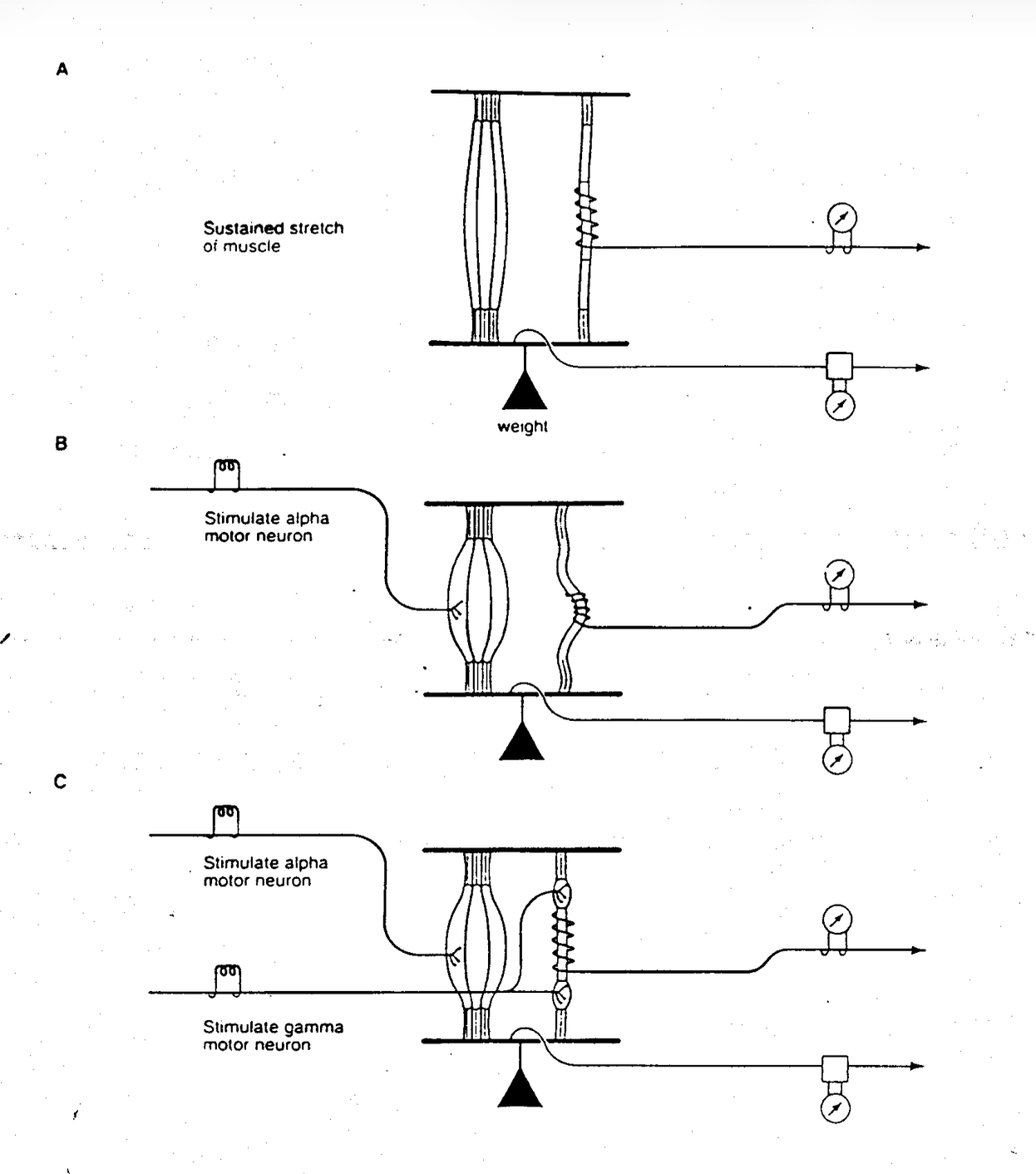
筋肉のアルファ収縮、筋肉のガンマ・ループ収縮、および筋肉の伸長時における筋紡錘の図
この簡略化された図では、筋肉収縮の3つの条件が示されている。
A. は筋肉が引き伸ばされているところを示しており、これが紡錘体の伸長を導き、それが今度は環状らせん終末の巻きつきを引き伸ばす。この条件は、筋肉のアルファニューロン刺激を沈殿(誘発)させる。これが伸張反射の作用である。
B. は筋肉のアルファニューロン刺激(上記Aの結果、または何らかの随意的行動の結果として)を示しており、これは今度は紡錘体をたるませ、環状らせん終末の巻きつきを短縮させる。この作用は、反射によって開始された筋肉のアルファ刺激をオフにする。
C. は紡錘体のガンマニューロン刺激を示しており、これはその後収縮し、そうすることによって環状らせん終末の巻きつきを引き伸ばす。この伸長は、アルファニューロンを介して筋肉の収縮を刺激する。¹²
---
彼女の手をテスターの肩に置く。彼女はテスターが下向きの力を加える際、腕を曲げられないようにと言われる。腕は曲がることに抵抗できない。被験者がテスターの背後の壁に向かって届く(リーチする)ように言われると、腕はより強くなり、曲がることに容易に抵抗できる。
ゴダールは筋電図を用いて、被験者が腕をまっすぐに保つために労力を使っている最初のケースにおいて、上腕二頭筋(この例における拮抗筋)が関与して活動しており、同様に(作動筋である)上腕三頭筋も活動していることを示した。その行動は、拮抗筋によって意図せずサボタージュされている。後者のケースにおいては、リーチの衝動が拮抗筋を引き起こさず、結果としてより大きな有効性をもたらした。
ガンマ運動システムは、このより効率的な筋肉の使用の原因として想定されている。ガンマ・ループが活性化されるのは、皮質がそのタスクを空間的方向づけを行う脳の部分へと委ね、それが今度はアルファ運動システムを活性化するためにガンマ・ループを雇用するからである。
ロルフ博士は、彼女が(理想的には)...「屈筋が屈曲するとき、伸筋は伸展する」¹³ という声明を出した際、この現象に言及していた。私たちはこの状態を、相反神経支配のより純粋な機能として記述することができるだろう。相反神経支配は、私たちが自らの随意的であり、したがって分化の度合いが低いアルファの指令によってそれをサボタージュしないときにうまく機能する。
要約すると、運動のために重力応答システムを利用することは、より効果的で、労力が少なく、拮抗筋の逆効果な収縮を最小限に抑える可能性が高く、より微細な制御を可能にする運動へとつながる。ストラクチュラル&ムーブメント・インテグレーションの運動のキューは、これらの質を喚起するように設計されている。明らかに、これらの原理はすでに私たちのテクニックの多くに暗黙のうちに含まれている。
モデル
トニック・ファンクション(トーヌス機能)の構図を組み立てる次のステップは、最適な重力応答の基礎となる介入のカテゴリーを詳細に説明することである。私たちのワークやカリキュラムを組織化する一つの方法は、私たちが教えようとしている現象の複雑さを含めることができるモデルを明確に表現することを目指して働くことである。私は、そのようなモデルを評価するための基準を次のように提案する。すなわち、実践者がクラスや実践において使用するテクニックの多様性を包括していること、私たちが実際に観察する結果を首尾よく予測すること、そして運動と構造の生理学を取り巻く科学的パラダイムと結びついていること、である。
このトニック・ファンクションのモデルは、ロルフィングの構造的および運動的ワークの主要なカテゴリーを意味あるものにする。それは、ロルフ博士が「人間の人間による使用における未踏の因子としての重力」¹⁴(イタリック体は原文ママ)として見たものの中心にある独自の方法の統合を言い換える方法である。トニック・ファンクションは、ロルフィングを通じて人の機能の質を変化させようと試みる際に、意識的または無意識的に交渉される諸因子の記述である。これらの要素はすべて、身体の重力応答における変化のための潜在的な入り口(エントリーポイント)である。その計画は以下に図式化されている。
基本トニック・ファンクション計画の図式
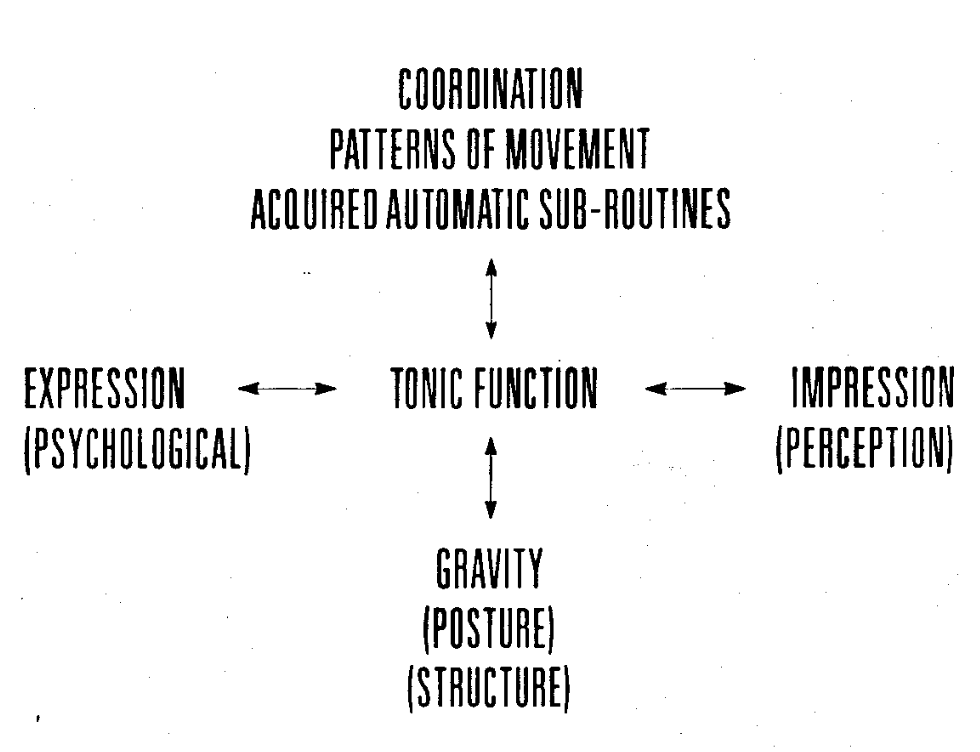
(これらの因子はすべてトニック・ファンクションとお互いに影響を与え合う。運動もまた、今度は他の因子、主に個人の記憶や環境、あるいは状況によって影響を受けるが、私はこの議論の目的のためにそれらを無視することを選択している。)
この図は、トニック・ファンクションへの4つの入り口を形式化する4つのカテゴリーを示している。私たちは筋膜(ファシア)における適応能力を回復させる方法として、重力と構造(ストラクチャー)に働きかける。私たちは、身体が重力との関係においてそれ自体を再配置できるように、戦略的に筋膜を動かす。ポスチャー(姿勢)は、重力制御システムの利用を最適化してこなかった運動パターンの症状である可能性がある。その組織のコミットメント(固定化された従事)のいくらかが変更されるまでは、過度に皮質化された(随意的すぎる)運動を手放す感覚にアクセスすることは、はるかに困難である。
他の因子もまた、私たちがロルファーとしてワークする方法の一部である。インプレッション(印象)または知覚(パーセプション)は、その人がどのように感覚を取り入れているかを指す。身体のどの部分が求心的に生きており、どの部分が失われているだろうか。固有感覚(プロプリオセプション)は、重力応答および制御システムへのトリガーである。皮膚、特に手や足、顔において豊かな感覚の経験があるとき、それは運動制御におけるガンマ活動を刺激するように思われる。固有感覚がガンマ活動に与える影響は、私たちが観察する変化の多くが、単にクライアントに感覚へ注意を向けるよう教えることの結果として生じる理由を説明している。感覚に注意を向けるという行為はすでに一つの運動であり、それはその後の運動の質に影響を与えることができる運動である。エミリー・コンラッド・ダウド(Emilie Conrad D'aoud)のコンティニュアム(Continuum)・ワークは、とりわけ、感覚的知覚がどのように運動を変化させるかのデモンストレーションである。
知覚はまた、私たちが何を想像するか、そして私たちの身体の外側にあるものをどのように知覚するかをも指す。私が自らの仙骨の重みを感じることに参入するとき、それは私がどのように立ち、どのように歩くかを変えることができる。私はまた、想像力を通じて、自らの上の空間、空を知覚することができ、その知覚は私の身体の筋肉における変化を喚起する。筋肉におけるトーヌスの質はまた、私の視線が焦点化されているか、あるいはペリフェリー(周辺部)にあるかに応じて変化するだろう。
したがって、インプレッションは内側(自律性との関係に関するもの)と外側(世界との関係に関するもの)の両方である。任意の時間において、これら両方のカテゴリーの知覚を活性化させることができないことは、重力応答システム(トニック・ファンクション)が運動を統治する能力を制限し、結果として適応能力を制限する。
エクスプレッション(表現)は、自然な表現のフロー(流れ)が存在するかどうかに応じて、クライアントがその運動においてコントロール(制御)されているか、あるいはインヒビット(抑制)されているかという私たちの観察を指す。一例は、呼吸パターンの結果である声の表現である。もし私たちがクライアントに対し、楽しい、あるいは親しみのある方法で歌ったり話したりするよう誘うなら、その応答には、皮質による制御がより少ない横隔膜の作用が含まれるかもしれない。横隔膜の制御の解放は、ラバン(Laban)が「バウンド・フロー(束縛された流れ)」から「フリー・フロー(自由な流れ)」¹⁵ と呼んだものへの移行に似ている。表現、すなわち環境へと外側に向かう人の自由な運動は、抑制への矛盾(反論)であり、それは今度は横隔膜のトーヌスにおける変化として現れる。私たちは、無意識的または意識的な皮質的制御からの横隔膜の解放があるとき、組織や運動器系における運動の可能性が変化することを頻繁に観察する。エクスプレッションの考慮は、私たちのワークの心理学的側面を理解することの重要性を示している。心理学的レベルにおける抑制は、横隔膜(諸隔膜)の抑制として現れる。この種の抑制にアプローチする一つの方法は、縛られていない表現の可能性を創造することである。
エクスプレッションの抑制が存在する限り、重力制御システムが運動において最適に機能することは妨げられる。横隔膜(諸隔膜)が、収縮したトニックな筋肉と同様に、あらかじめ決定された運動の固定化へとコミットしているとき、脊椎は伸長することができず、重力応答メカニズムの大部分は先取(阻害)されてしまう。
コーディネーション(協調性)、あるいはスキル(技術)は、クライアントの進化における学習された側面に関係している。明白であるコーディネーションの種類は一つの因子であり、新しいスキルの確立は重力システムが機能することを「許容する(allow)」ための基礎となる。ここでの操作可能な言葉は「許容する」である。なぜなら、重力システムの抑制の多くは、随意的(アルファ運動)システムによる先取的な制御から生じているからである。
私たちがクライアントに教えるスキルの多くは、皮質がそれ自体の部分を抑制(インヒビット)するために皮質を使用することである。皮質は悪者ではない。私たちは、注意を集中させるために衝動を抑制することを選択しなければ、静かに座ってこの論文を読むことすらできない。いわゆる皮質化された運動とは、過剰な制御に対する皮質的抑制の欠如のことである。
発達的に、私たちは環境や自分の身体をある程度制御するために、運動のバウンド・フローを学ばなければならない。ロルファーとして、私たちはクライアントにこの発達プロセスの次のステップを教える。それは、トニック・ファンクションの妨げとなる制御を抑制するためのスキルを発達させることである。
自動的なサブルーチンは生涯を通じて獲得され——その多くは極めて早期に学習される。いくつかのスキルは、幼児期に逃してしまうと、成人に対して教えることが非常に困難になる。それはまさに、コーディネーションが条件反射に深く埋め込まれているからである。反射的行動を解くことは、知覚の原理と象徴的な着色(サンプリング)を通じてアプローチされなければならない。¹⁶ この教授プロセスの例は、座るプロセスにおいて坐骨が「後ろにスライドする」のを許容するという命令に見出される。通常の機能(Normal Function)の理解において、ハンス・フルーリー(Hans Flury)とヴィリ・ハルダー(Willi Harder)は、筋肉がリラックスできるように筋膜が荷重(ロード)することを可能にするスキルを教えている。¹⁷ しかし、教授プロセスは、坐骨の感覚、重みの感覚、そして後ろという方向の感覚とそれに対応する前という方向、この場合は体幹の前面の伸長に焦点を当てなければならない。コーディネーションを促進することは知覚を教えることを意味する。なぜなら、多くの場合、求心性活動を変化させるのは感覚を知覚するという行為そのものだからである。誰かに運動を示すこと——彼らに形態を示すことは、ゴダールが好んで言うように、しばしば「運動の終わり」となる。私たちが感覚を感じることを通じて運動を教えるとき、クライアントにとって「うまくやる」ために模倣したいという誘惑が持続する可能性はあるものの、新しい皮質制御プログラムをインストールしてしまう可能性は低くなる。
コーディネーションは、実際のところ、意識的な随意的制御の外側に存在する因子である。私たちは、制御を喚起する指示を通じてそれを教えることはできない。しかし、しばしば私たちはそうしようと試みてしまう。コーディネーションは、知覚への注意、あるいは運動やそれが起こる環境の象徴的な意味を変化させることを通じて発見され得る。コーディネーションは、トニック・ファンクションのワークの総計である。それは、トニック・ファンクションの原理を首尾よく追った結果であり、それが獲得された自動的スキルとして私たちに属しているときには、トニック・ファンクションへの入り口でもある。
トニック・ファンクション図の目的は、イントリンジック・ムーブメント、すなわちトニック・システム、重力応答システムを最適化する運動を喚起する際、私たちが意識的または無意識的に交渉する因子のマトリクスを表現することである。これらの因子はすべて、イントリンジック・ムーブメントへの入り口である。これらの因子は、教育目的のために私たちのレパートリーの断片を分類するための基準を形成する。実践において、私たちのワークは通常、これらすべてのツールの絶え間ないシフトとブレンドである。
脊椎の伸長
トニック・ファンクションのモデルのこの一部の要約を念頭に置きつつ、私は、脊椎を屈曲、伸展、回旋、および側屈させる筋肉のトーヌスもまた、トニック・ファンクションの中心的な焦点であるという概念に戻りたい。その原理は、腰椎および頸椎のロードシス(前弯)を制御する筋肉のトーヌスの減少が、トニック・ファンクションに、したがってイントリンジック・ムーブメントに特に好都合な効果をもたらすと述べている。より単純に言えば、イントリンジック・ムーブメントは常に脊椎の伸長によって開始される。伸長は具体的にどこの場所で起こるのだろうか。トーヌス減少の鍵となる場所は、身体の中で最も筋紡錘が密集している筋肉である首の後頭下筋群、および、グラコヴェツキー(Gracovetsky)によれば主に腰椎ロードシスの調節器である大腰筋と脊柱起立筋であるよう思われる。¹⁹ 解剖学的および生理学的に、私たちは脊椎の伸長の定義についてかなりの長さにわたって(そしておそらく生産的に)議論することができるだろう。しかし、統合的なワークを行うためのモデルという目的において、私たちは、運動のイニシエーター(始動器)としてのこれら2つの言及されたロードシスのリラクゼーションが、運動における強化された重力応答、すなわち私たちがトニック・ファンクションと呼んでいるものへと導くことを観察する。(ここで私が関節の角度について記述することを明確に避けていることに注目してほしい。ロードシスの領域におけるトーヌスのリラクゼーションが、伸長のための基準である。したがって、私は理想的な腰椎の角度に関する論争を避けることを選択している。関節の角度は、非常に個別的かつ状況的なイベントとなるだろう。)
私たちはまた、私たちが脊椎の伸長と呼んでいるものに関して、再現可能な実験が存在することを観察している。第一に、それは必然的に、2つの方向を伴う応答である。一つの方向、一つの極は、重みの感覚であり、重いものとしての仙骨の感覚、あるいは体重を支持する骨盤底や足の感覚である。それはまた、「身体の内部環境の感じられた感覚」として記述することもできる。これを言うもう一つの方法は、「身体内の重い質量の感じられた感覚」である。もう一つの方向、あるいは極は、外側の感覚——私たちの外側や私たちの上の空間における場所の感覚であり、空、天井、人々や物との関係性の感じられた感覚である。私たちは、これら2つの認識の極に注意を向けることに成功すると、イントリンジック・ムーブメントが引き出されることを観察できる。ピーター・レバイン(Peter Levine)は、自律神経系におけるエルゴトロピック(E:向活動性)とトロフォトロピック(T:向休息性)の極性に注意を集中させており、この概念はこのモデルと完全に一致している。「トロフォトロピック」とは「内側への注意、および内側からの応答の感覚」を意味する。「エルゴトロピック」とは「身体の外側の現象への注意、およびそれへの応答」を意味する。²⁰ ゴダールは、どちらか一方の極性への遺伝的素因が実際に存在すると主張しており、私はそれは妥当だと考えている。(この立場の裏付けの一つは、ニューヨーク市で癌の治療のためにこの素因を利用する方法を開発した医師、ニコラス・ゴンザレス(Nicholas Gonzales)の仕事から得られる。ゴンザレスは、血液化学の分析を通じてこの素因を文書化してきた。交感神経優位の患者、副交感神経優位の患者、そしてバランスの取れた自律神経素因を持つ患者の間には、測定可能で持続的な生理学的データに一貫した差異が存在するようである。)²¹
知覚的に、伸長応答は2つの方向、2つの極に関するものである。生理学的に、それは身体が筋肉の両方の付着部が互いに離れていく空間的タスクとしてトーヌスのリラクゼーションを処理する必要性に関するものである。この方法により、協同筋(シナジスト)を介して付着点の一方を安定化させようとする傾向が防止される。比喩的に言えば、それはパリントニックなスパンである。
原理とモデルの応用
ストラクチュラル&ムーブメント・インテグレーションの実践者を訓練する上での本当に困難な部分は、彼らに正確に「見る(シーイング)」ことを教えることである。静的または動的なクライアントにおける特定の因子を見ることは容易ではなく、これらの因子の変化を喚起するスキルを獲得することはさらなる挑戦である。私たちは誰かの抑制された横隔膜を見るかもしれないが、それに対して何をするのだろうか。私たちは股関節の屈曲に伴って腰椎のロードシスが増加するのを見るかもしれないが、どのように介入するのだろうか。私たちがどのように介入するかは、私たちがその現象をどのように記述するか、そして私たちが望む変化をどのように記述するか——事実上、私たちが自らの間、およびクライアントとの間で使用する言語に依存するだろう。別の議論において、私はトニック・ファンクションの視点から主要な運動に対処する具体的な介入について記述する予定である。これらのテクニックの多くは、私たちがすでに行っていることと類似しているか、あるいはそれらをトニック・ファンクションの原理と一致させるためのリフレイム(再枠付け)である。
この議論のポイントは、私たちが過去に行われてきたよりも体系的かつ一貫してそれを教えることができるように、私たちが何を行うかをより正確に記述することである。体系的な一連の原理は、私たちのゴールが意味をなしているか、そしてそれらが満たされているかどうかを判断する手助けとなる。それはまた、インテグレーションの訓練プロセスに伴うプレ・トレーニング(事前訓練)やライフサイエンス(生命科学)の訓練をどのように行うかを組織化することへのアプローチにもなり得る。つまり、重力応答の専門家、すなわちロルファーを訓練する構成要素は、モデルから導き出される。私たちは、生理学が私たちのワークの領域内でどのように具体的なゴールを持っているかを見始める。私たちは、心理学が心理療法に関するものではなく、むしろ重力応答に影響を与える象徴的因子に関するものであること、などを見出す。ハンス・フルーリーや他の人々は、ロルフ博士のユニークなビジョンが完全に評価され発展しているかどうかをよりよく確認できるように、私たちが何を行っているのか、そしてなぜそれを行うのかについて厳密な思考を行うようロルフ研究所に勧告してきた。私は、ユベール・ゴダールの統合がこの方向へのもう一つのステップであると考えている。
---
【重要語句・概念の解説】